9.4.6. Reliability assessment of degraded systems#
Depending on the system architecture and the functions of its components, the loss of some single components in redundant system architectures does not necessarily lead to the total loss of a function, but results in a degraded system performance. For the reliability assessment, usually 100% performance is defined, and any deviation is considered as a system failure. From a risk assessment perspective, it is also interesting to know how much the actual performance deviates from the specified one and if some residual performance can be maintained. Not only failure scenarios leading to total loss are relevant, but another important criterion is also whether a certain performance level can be achieved or not.
To allow for the calculation of occurrence probabilities for degraded modes of system performance, a relative contribution to system performance at component level is assigned. The method is based on the evaluation of RBD described through its success path. The system performances are linked to a minimum set of resources and modelled accordingly as RBD.
To illustrate the concept of performance degradation, the fictive example of the power supply system is extended such that the contribution of each solar panel is also taken into account. Solar panel #1 (component 3) provides 500W, solar panel #2 (component 4) provides 300W and solar panel #3 (component 5) provides 200W electrical power. The corresponding reliability block diagram is shown in Fig. 9.4.30.
The system can be described through the following success paths.
|
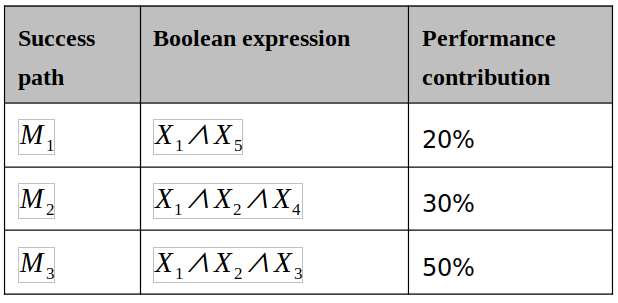
Where \(M_{i}\) denotes a success path, i.e. a combination of components for which the system is in operable state if all components of the success path are operational. The success path is represented by conjunctive terms of indicator variables \(X_{i}\). At least one minimal success path is required to get a working system.
In this example, if all three solar panels are working, an electrical power of 1kW is provided. In the following, a relative contribution to the system performance is assigned to the different solar panels. To component 3 a relative contribution of 50% is assigned, that means if the success path that contains the component 3 is functioning, 50% of the total system performance are available. In this case, 50% of electrical power. Component 4 has a relative contribution of 30% and 20% are assigned to component 5.

Fig. 9.4.30 Example Reliability Block Diagram - System with degraded performance.#
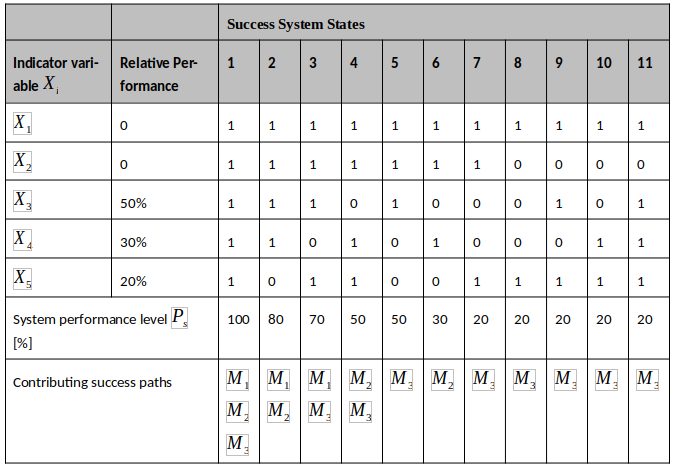
In Table 9.4.12 all system states with a system performance superior to 0% are listed. To each elementary state the contributing success path is listed in Table 9.4.12. all system states with a system performance superior to 0% are listed. To each elementary state the contributing success path is listed in \(p_{S}\) can be achieved.
|
Based on the elementary states that are linked to a certain system performance level, a Boolean system function \(\Phi_{P_{S}}\) can be obtained that describes the top event “system performance level equals \(p_{S}\)”. With \(p_{S} = 50\%\) the following system function \(\Phi_{P_{S}}\) is obtained:
Equation
Since the elementary states are mutually exclusive, the probability of occurrence can be calculated based on the system state function in Eq. (9.4.68).
Equation
With this method, the occurrence probability for all system performance levels at the end of the mission duration can be calculated, where the following definition applies:
Equation
Note
For practical reasons, the applicability of this method using elementary system states is limited to systems with a small number of components, since the number of states grows exponentially with the number of components. For n components \(2^{n}\) states have to be considered.
Therefore, it is more efficient to use the success paths. For each system performance level, the correlated success paths should be generated. In addition, auxiliary conditions are defined that describe the logical combination of the performance determining components that are required to achieve performance levels equal to or greater than \(p_{S}\). This will be explained using the example shown in Fig. 9.4.30 and Table 9.4.13. The analysis of degraded systems consists of the following steps [BR_SYS_29]:
Identification of all possible system performance levels through combination of the performance contributing components.
Generation of success paths and auxiliary conditions to obtain Boolean disjunctive normal form.
Orthogonalization of success paths to obtain orthogonal conjunctive normal form.
Calculation of system performance occurrence probability with component reliability and component failure probability.
Inverting the calculated values to obtain the performance distribution function.
To achieve a system performance of \(p_{S}\) ≥ 50%, the following condition can be defined, which describes a combination of success paths for which the system performance is at least 50%.
Equation
Generally, the condition can be formulated as:
Equation
Where, \(g_{\max}\) denotes the number of component state variables of the conjunctive terms of the auxiliary condition and \(f_{\max}\) denotes the number of disjunctive terms.
Eq. (9.4.71) can be simplified and the following term is obtained:
Equation
The system state function can be defined as follows:
Equation
Where, \(k\) denotes the index of the success paths and \(m\) the total number of success path.
With Eq. (9.4.72), the following expression is obtained for the system state function for the top event “system performance \(p_{S}\) ≥ x” [BR_SYS_29].
Equation
Where, \(h\) denotes the index of the success path. Each success path can contain of set of state variables \(X_{g}\) with \(g\) from \(1\) to \(g_{\max}\). With Eq. (9.4.75) and Eq. (9.4.73), the following system state function is obtained that represents the top event “system performance \(p_{S}\) ≥ 50%”.
Equation
Equation
Through orthogonalization, Eq. (9.4.77) can be transformed from a Boolean conjunctive normal form to an orthogonal conjunctive normal form, Eq. (9.4.78).
Equation
Thus, Eq. (9.4.78) represents mutually exclusive events and the probability of a system performance greater than or equal to 50% can be directly obtained by replacing indicator variables by the component reliabilities or failure probabilities respectively.
Equation
To calculate the occurrence probability for all possible system performance levels, the before mentioned calculation should be repeated for the different combinations of available solar panels resulting in different performance levels.
The following auxiliary conditions are obtained from Table 9.4.13 for the different system performance levels.
Equation
Equation
Equation
Equation
Equation
The probability that the system performance is within the interval [0, x] is defined as the performance distribution function.
Equation
The performance distribution function is obtained by inverting the function \(P_{\geq x\mathrm{\%}}.\)
Equation
The occurrence probabilities for the different system performance levels are shown in Table 9.4.14.
Occurrence Probability |
||
|---|---|---|
Performance Level |
\(P_{ < x \% }\) |
\(P_{\geq x \% }\) |
0% |
3,00E-03 |
99,7% |
20% |
9,17E-02 |
91% |
30% |
9,43E-02 |
91% |
50% |
1,54E-01 |
85% |
70% |
2,12E-01 |
79% |
80% |
2,46E-01 |
75% |