9.4.8. System level modelling of degradation#
In this paragraph, the modelling of degradations is addressed, from component level to system level.
9.4.8.1. Degradation model on component level#
The fact that degradation can occur at component level and that the failure rates are then no longer constant needs to be considered for the system level reliability prediction. To calculate the reliability of components prone to degradation, the following three approaches are introduced. In this paragraph, the use of these degradation models for system level reliability prediction is shown.
Model 1
The failure probability is the sum of random failures and degradation failures assuming that degradation can occur throughout the entire service life and not just after qualification lifetime. . With this model, the lifetime of an item can be interpreted as the minimum of the lifetime based on random or degradation failures. Random failures are described by an exponential distribution and degradation by a Weibull distribution. Thus, the following equations are obtained for failure rate and reliability:
Equation
Equation
Model 2
This model assumes that degradation failure can only occur after the qualification time \(\tau_{1}\), before it no degradation is considered and only random failures are considered. Thus, to calculate failure rates and reliability a distinction between two cases is made: Time t is below the qualification time \(\tau_{1}\) and \(t\) is equal to or greater than the qualification time.
Equation
Equation
Model 3
The failure rate \(\lambda\left( t \right)\) is the maximum of the random failure rate and the degradation failure rate, Eq. (9.4.97). At a certain operating time \(t = \tau_{2}\) the failure rate due to degradation \(\lambda_{W}\) equals the constant failure rate of random failure, Eq. (9.4.98). From that point on the degradation failure rate is dominating. Thus, the probability density functions are separated in random failures only for \(t < \tau_{2}\) and degradation only for time \(t \geq \tau_{2}\):
Equation
Equation
Equation
Equation
The time \(\tau_{2}\) can be obtained from Eq. (9.4.101).
Equation
9.4.8.2. Degradation in phased missions#
For components used in phased missions, the failure rates cannot only depend on the stress levels applied in different phases, but also on the age of the component. Consequently, the time duration of each phase cannot be considered independently. If degradation and age of the components are relevant to determine the component reliability the accumulated mission time should be considered, which is given by:
Equation
Where,
\(T_{\text{Ck}}\) denotes the accumulated time of component from mission start to phase \(k\),
\(T_{i}\) denotes the duration of phase \(i\).
The reliability function of the component that is exposed to random failures and also degradation failures throughout the mission is given in Eq. (9.4.103) (see degradation first approach in Section 9.4.8.1).
Equation
Where,
\(T_{\text{Ci}}\) denotes the accumulated time of component from mission start to phase \(i\),
\(T_{i}\) denotes the duration of phase \(i\),
\(t_{}\) denotes the time starting at beginning of phase \(k\) such that, \(0 \leq {t \leq T}_{k}\),
\(\lambda_{k}\) denotes the failure rate of the component in last phase \(k\),
\(\lambda_{i}\) denotes the failure rate of the component in phase \(i\),
\(\alpha_{i}\) denotes the characteristic life of the Weibull distribution in phase \(i\),
\(\alpha_{k}\) denotes the characteristic life of the Weibull distribution in the last phase \(k\),
\(\beta_{i}\) denotes the shape parameter of the Weibull distribution in phase \(i\).
If degradation occurs only after the qualification time \tau is reached (second approach) Eq. (9.4.103) can be adapted accordingly and for \(T_{\text{ck}} > \tau\), the following equation is obtained.
Equation
Where,
\(\tau_{1}\) denotes the qualification time of the component.
For mission phases before qualification time, \(T_{\text{ck}} < \tau_{1}\), degradation does not should be considered and the reliability of the component in phase k is given by Eq. (9.4.30).
For Model 3, see Section 9.4.8.1, degradation is considered only for \(T_{\text{ck}} > \tau_{2}\) and for \(T_{\text{ck}} < \tau_{2}\) only random failures are taken into account. The following equation is obtained for \(T_{\text{ck}} > \tau_{2}\).
Equation
Where,
\(\tau_{2}\) denotes the time at which the degradation failure rate equals the random failure rate.
For \(T_{\text{ck}} < \tau_{2}\), the reliability function of the component in phase \(k\) is also given by Eq. (9.4.30).
9.4.8.3. Reliability of serial and parallel systems considering degradation#
The system reliability function for a serial system is given by:
Equation
The reliability for a parallel system in hot redundancy, thus all components in use and same load is applied is given by:
Equation
In order to consider degradation of the components, the corresponding reliability function of the degradation model is to be used.
If for example the first approach for degradation modelling is used for both components, given by Eq. (9.4.94), the following is obtained for a serial system:
Equation
For a parallel system, the following expression is obtained:
Equation
9.4.8.4. Conditional reliability#
The conditional reliability is the probability of a system successfully completing another mission phase knowing that it has not failed during previous phases. This conditional reliability is of particular relevance for lifetime extensions. The fact that a component was working correctly without a failure over a certain period of the mission needs to be considered to estimate the reliability over the following phases of the mission. The system’s conditional reliability function is given by:
Equation
In the following, an example of a serial system that consists of two components is considered. The system reliability is given by:
Equation
The mission duration should be extended from 50000 hours by another 10000 hours to 60000 hours. 50000 hours correspond to the qualification time of the components and the system was still in operational state after 50000 hours were accumulated. For the components the following parameters shown in Table 9.4.16 are given:
Parameter |
Component 1 |
Component 2 |
|---|---|---|
\(\lambda_{R}\) |
1,00E-06 1/h |
1,00E-06 1/h |
\(\beta\) |
3,2 |
3,2 |
\(\alpha\) |
150000 h |
150000 h |
\(T\) |
50000 h |
50000 h |
\(t\) |
10000 h |
10000 h |
\(\tau_{1}\) |
50000 h |
50000 h |
Eq. (9.4.112) provides the reliability for a mission extension of a duration t giving that T hours of successful operation have already been accumulated up to the start of the mission extension. The system reliability is evaluated to assure that it will complete the next mission extension successfully.
Equation
If model 2 is applied for example, to consider the degradation of the components, the following equation is obtained:
Equation
With the three degradation models the following results shown in Table 9.4.17 are obtained. It can be seen that the first approach provides the most conservative results, as it takes degradation already from t=0 into account.
Model 1 |
Model 2 |
Model 3 |
||
|---|---|---|---|---|
\(R_{1} (T)\) |
Reliability comp. 1 at T=50000 h |
0,9234 |
0,9512 |
0,9707 |
\(R_{1} (T + t)\) |
Reliability comp. 1 at T+t=60000 h |
0,8929 |
0,9416 |
0,9481 |
\(R_{2} (T)\) |
Reliability comp. 2 at T=50000 h |
0,9234 |
0,9512 |
0,9707 |
\(R_{2} (T + t)\) |
Reliability comp. 2 at T+t=60000 h |
0,8929 |
0,9416 |
0,9481 |
\(R_{S} (t|T)\) |
Conditional system reliability T+t if no failure occurred at T |
0,9351 |
0,9799 |
0,9540 |
9.4.8.5. Reliability of standby systems with and without a switching device#
In the following paragraph, another form of redundancy is presented: standby redundancy. In standby redundancy the components have two states: an active state and a standby state. The stand-by component is exposed to reduced loads while not needed and under the operating load when they are activated. Consequently, components in standby redundancy have two failure distributions, one for each state. In the case that both stand-by and active failure distributions are the same, the units are in a simple parallel configuration (also called a hot standby configuration). When the failure rate of the standby component is lower than in active mode that is called a warm standby configuration. When the rate of failure of the standby component is zero (i.e., the component cannot fail when in standby), it is called a cold standby configuration.
The reliability of the system at time t can be obtained using the following equation [BR_SYS_3]:
Equation
Where,
\(R_{1}\) denotes the reliability and \(f_{1}\) the probability density function of the active component,
\(R_{2,\text{sb}}\) denotes the reliability of the stand-by component in stand-by mode,
\(R_{2,A}\) denotes the reliability of the stand-by component in active mode.
Eq. (9.4.114) can be solved by numerical integration.
The previous example assumes perfect switching, i.e. activation of the stand-by component is certain once the active component fails. In reality, in many cases, a switching device is implemented in the system to activate the stand-by component when the active component fails. Therefore, the failure properties of the switch should also be included in the analysis as imperfect switching.
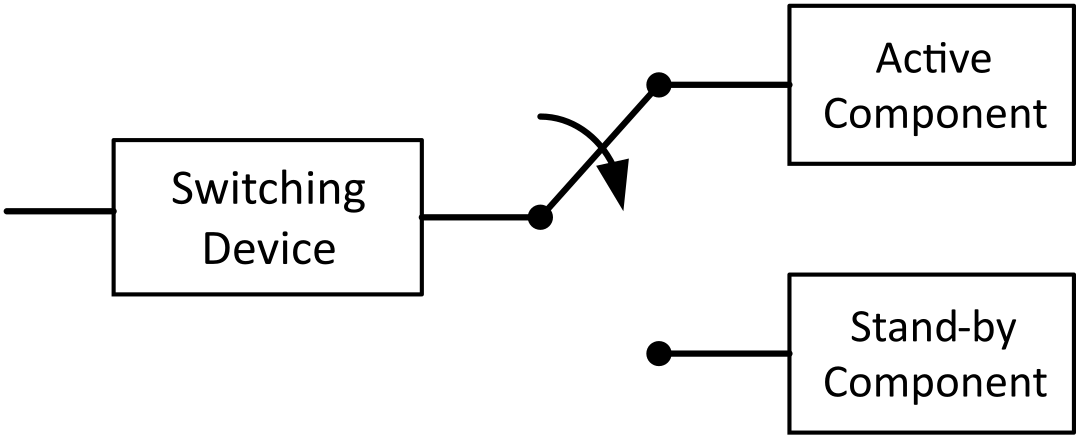
Fig. 9.4.32 Stand-by system with switching device#
Two scenarios should be considered to include the reliability of a switch in the analysis with two probabilities can be considered. The first one is the probability of the switch performing the action (i.e. switching) when requested to do so, the switch probability per request, which is expressed as a static probability. The second probability considers the possibility that the switch could fail before the active component fails, as the switch might wear out with age due to material degradation.
However, a switch failure does not cause the system to fail immediately, but if the active component fails and the switch has also failed, then the system cannot be switched to the stand-by component and it therefore fails. The reliability of the system including switching is given by the following equation [BR_SYS_3].
Equation
Where,
\(R_{1}\) denotes the reliability and \(f_{1}\) the probability density function of the active component,
\(R_{2,\text{sb}}\) denotes the reliability of the stand-by component in stand-by mode,
\(R_{2,A}\) denotes the reliability of the stand-by component in active mode,
\(R_{\text{SW}}\) denotes the reliability of the switch considering degradation,
\(R_{\text{SWREQ}}\) denotes the reliability of the switch per request given as time-invariant static probability.